Stability of explicit Euler's method
A simple model example
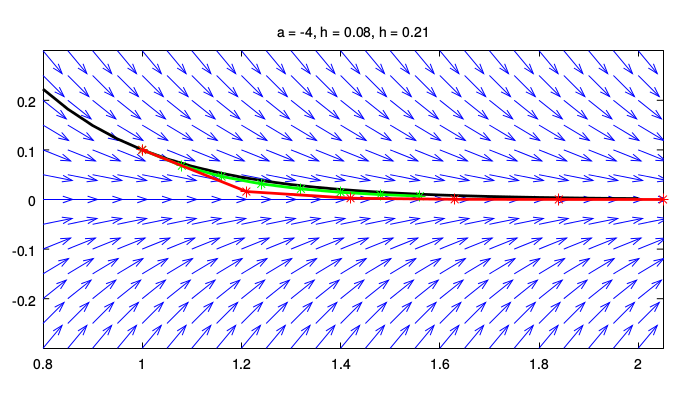
linear differential equation y' = a y , initial condition y(1) = 0.1
solved by explicit Euler's method using two different values of step-size h = 0.08 and h = 0.21
For a = -4, both choices of h give stable result; smaller step (green line) leads to higher accuracy than larger step (red line). Exact solution is represented by black line:
 .
.
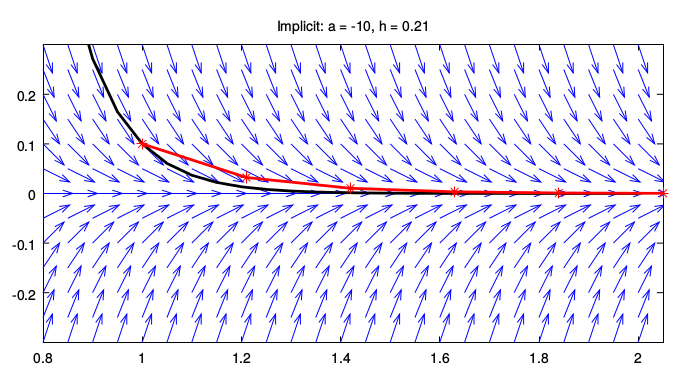
For a = -10 the larger step leads to instability of the explicit method:
 .
.
Stability of implicit Euler's method
However, the implicit Euler's method for a = -10 and larger step h = 0.21 is stable:
 .
.
Matlab programs
All figures were created by the following two programs in Matlab (you can experiment with your own choices of parameters a and h):
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % stability of explicit Euler's method %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% a = -10; % coeff. of the linear differential eq. h = 0.05; % step-size of the mesh xh = 0.8 : h : 2 ; % interval [ 0.8 , 2.5 ] divided with step h yh = -0.3 : h : 0.3 ; % interval [ 0.8 , 3.8 ] divided with step h [xx,yy] = meshgrid(xh,yh); % mesh on the rectangle xh, yh % direction field px = ones(length(yh),length(xh)); % px = 1 at every mesh-point [x,y] py = a*yy; % py = f(x,y) at every mesh-point [x,y] pp = sqrt(px.*px + py.*py); ppx = px./pp; % (ppx, ppy) = normalized (px, py) ppy = py./pp; hold off quiver(xh, yh, ppx, ppy) % an arrow (ppx, ppy) at every [x,y] hold on % exact solution x=1; y=0.1; % initial condition c = y*exp(-a*x); % coeff. of exact solution plot(xh, c*exp(a * xh),'LineWidth',2,'Color','k') % exact solution % two numerical solutions xp(1)=x; yp(1)=y; % initial condition % smaller step h = 0.08; for k=2:8 xp(k) = xp(k-1) + h; yp(k) = (1 + a*h) * yp(k-1); end plot(xp, yp, 'g*', "markersize", 8) plot(xp, yp, 'g','LineWidth',2) tit = ["a = ", mat2str(a) ,", h = ", mat2str(h)]; % for the title % larger step h = 0.21; for k=2:8 xp(k) = xp(k-1) + h; yp(k) = (1 + a*h) * yp(k-1); end plot(xp, yp, 'r*', "markersize", 8) % , "markersize", 4 plot(xp, yp, 'r','LineWidth',2) title([tit, ", h = ", mat2str(h)]); % title axis([0.8, 2.05, -0.3, 0.3]) % setting a scope axis equal; %%%%%%%%%% % the end %%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % stability of implicit Euler's method %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% a = -10; % coeff. of the linear differential eq. h = 0.05; % step-size of the mesh xh = 0.8 : h : 2 ; % interval [ 0.8 , 2.5 ] divided with step h yh = -0.3 : h : 0.3 ; % interval [ 0.8 , 3.8 ] divided with step h [xx,yy] = meshgrid(xh,yh); % mesh on the rectangle xh, yh % direction field px = ones(length(yh),length(xh)); % px = 1 at every mesh-point [x,y] py = a*yy; % py = f(x,y) at every mesh-point [x,y] pp = sqrt(px.*px + py.*py); ppx = px./pp; % (ppx, ppy) = normalized (px, py) ppy = py./pp; hold off quiver(xh, yh, ppx, ppy) % an arrow (ppx, ppy) at every [x,y] hold on % exact solution x=1; y=0.1; % initial condition c = y*exp(-a*x); % coeff. of exact solution plot(xh, c*exp(a * xh),'LineWidth',2,'Color','k') % exact solution % numerical solution xp(1)=x; yp(1)=y; % initial condition % the larger step h = 0.21; for k=2:8 xp(k) = xp(k-1) + h; yp(k) = yp(k-1)/(1 - a*h) ; end plot(xp, yp, 'r*', "markersize", 8) % , "markersize", 4 plot(xp, yp, 'r','LineWidth',2) tit = ["Implicit: a = ", mat2str(a) ,", h = ", mat2str(h)]; title(tit); % title axis([0.8, 2.05, -0.3, 0.3]) % setting a scope axis equal; %%%%%%%%%% % the end %%%%%%%%%%