spline křivka
- interpolační vícesegmentová křivka
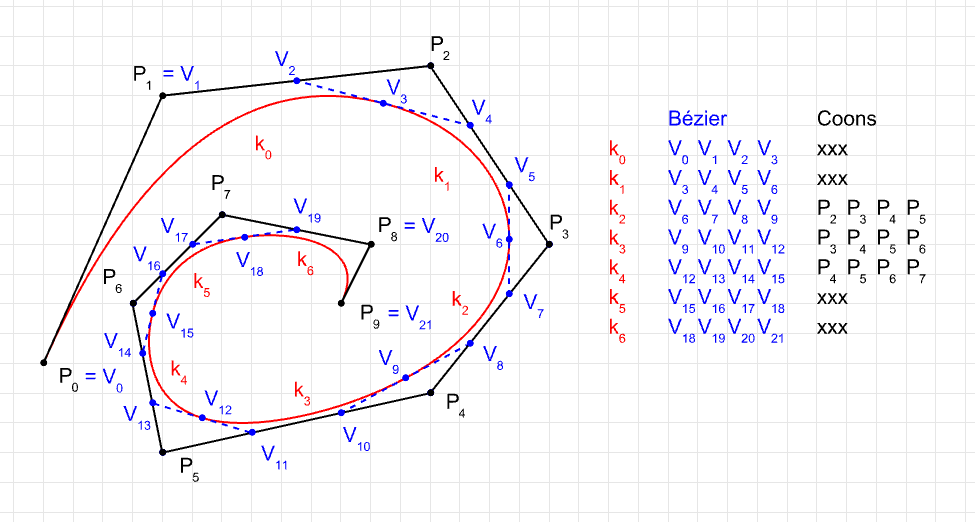
Coonsův kubický B-spline otevřený
řídicí polygon $P_0,P_1,P_2,P_3,P_4$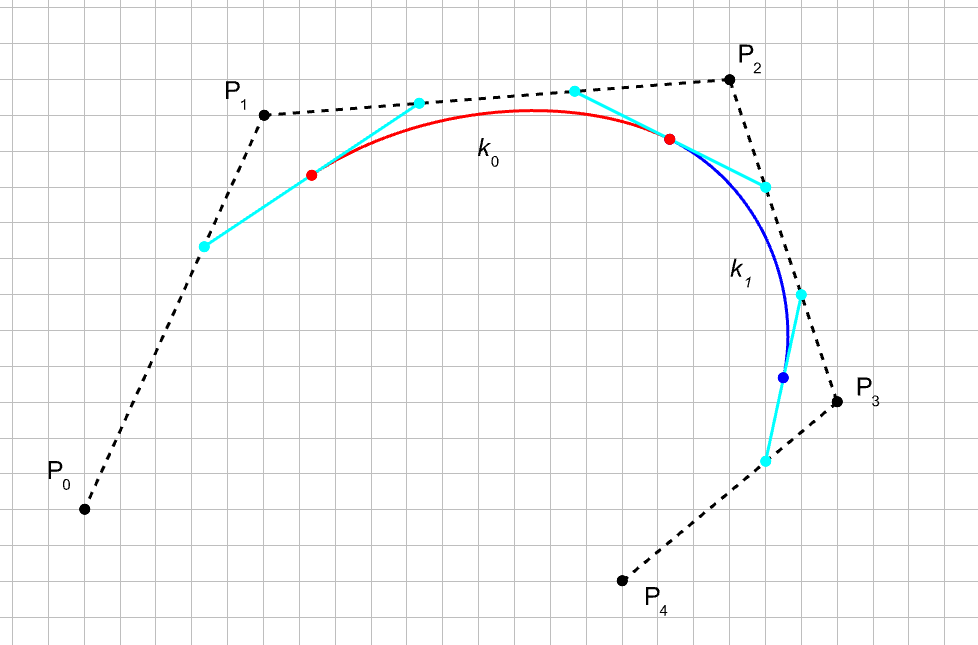
Coonsův kubický B-spline uzavřený
řídící polygon $P_0,P_1,P_2,P_3,P_4(,P_5=P_0,P_6=P_1,P_7=P_2)$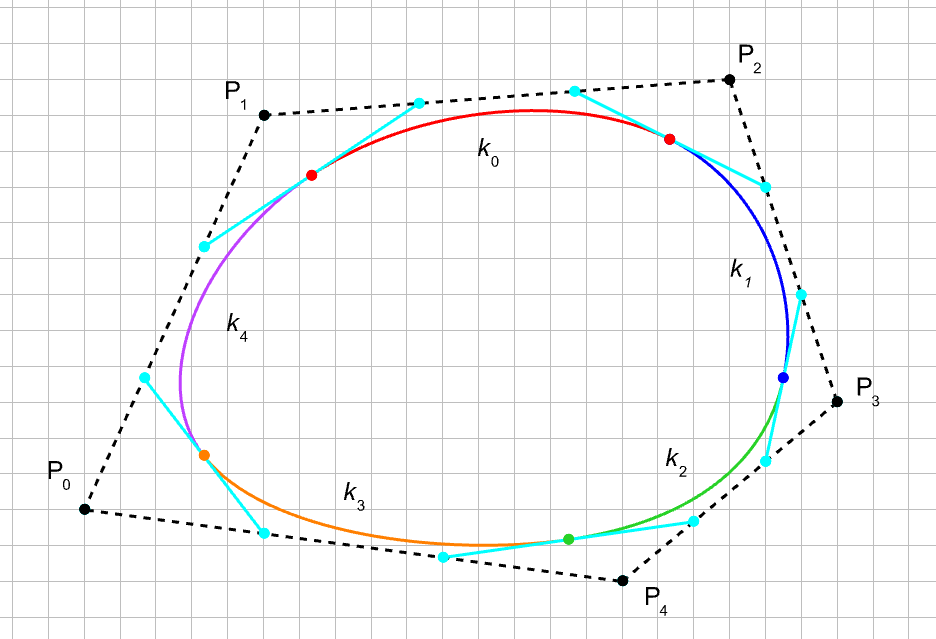
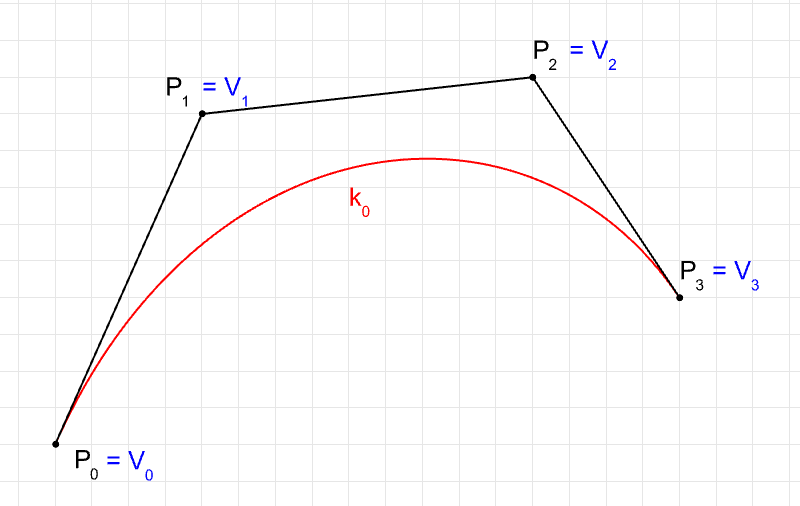
Ukotvená kubika - 4 body
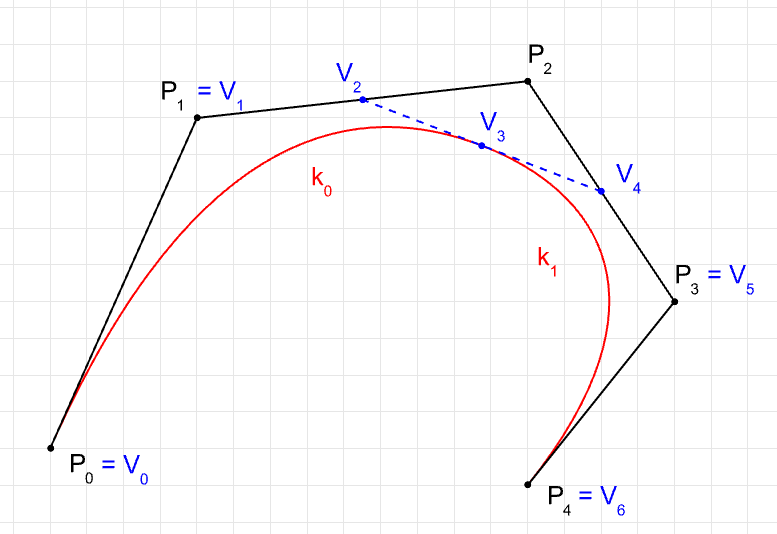
Ukotvená kubika - 5 bodů
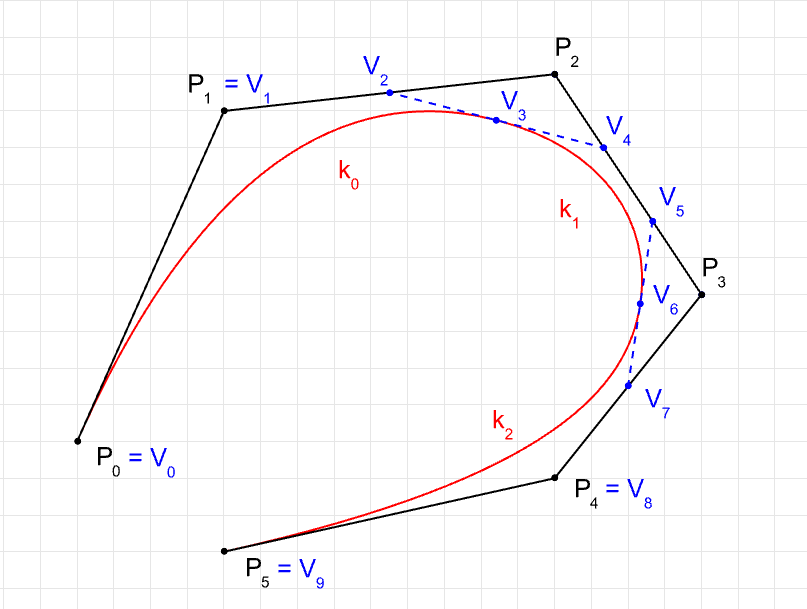
Ukotvená kubika - 6 bodů
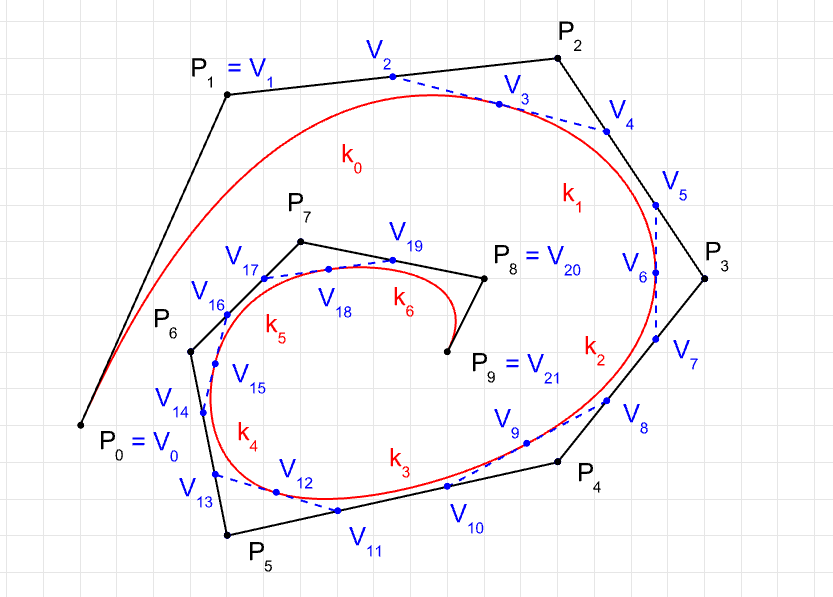
Ukotvená kubika - 10 bodů
Ukotvená kubika - Coonsův kubický B-spline
Interpolační křivky
- Fergusonova (Hermitova) kubika - jednosegmentová
- interpolace jedním polynomem ($n$ definičních bodů $\Rightarrow$ stupeň křivky $n-1$)
- definiční body interpolované po částech $C^2$ spojitě napojenými kubikami
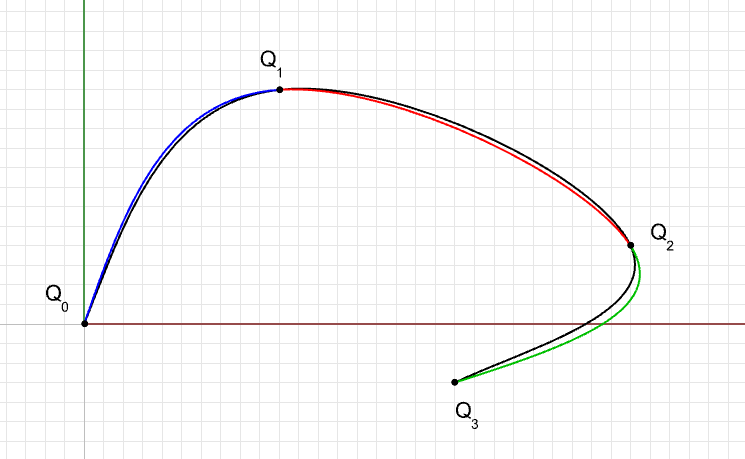
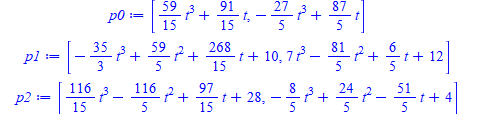
Příklad - 4 definiční body

Obecný postup
každý segment mezi dvěma po sobě jdoucími $Q$ body má být křivka 3. stupně
$$\Downarrow$$
$4$ neznámé koeficienty $\alpha,\beta,\gamma,\delta$ pro rovnici segmentu ve tvaru $\mathscr{P}(t)=\alpha t^3+\beta t^2+\gamma t+\delta$
$$\Downarrow$$
$4$ body $\rightarrow$ $3$ segmenty $\rightarrow$ $12$ neznámých
$$\Downarrow$$
$\mathscr{P}_0(0)=Q_0, \mathscr{P}_0(1)=Q_1=\mathscr{P}_1(0), \mathscr{P}_1(1)=Q_2=\mathscr{P}_2(0), \mathscr{P}_2(1)=Q_3$
$\mathscr{P}'_0(1)=\mathscr{P}'_1(0), \mathscr{P}'_1(1)=\mathscr{P}'_2(0)$
$\mathscr{P}''_0(1)=\mathscr{P}''_1(0), \mathscr{P}''_1(1)=\mathscr{P}''_2(0)$
$$\Downarrow$$
$10$ rovnic pro $12$ neznámých
$$\Downarrow$$
dodat další $2$ (okrajové) podmínky
(např.$\mathscr{P}''_0(0)=0=\mathscr{P}''_2(1)$)
(např.$\mathscr{P}''_0(0)=0=\mathscr{P}''_2(1)$)
Soustava rovnic pro určení $\mathscr{P}_i(t)$
$$\begin{pmatrix} 0 & 0 & 0 & 1 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0\\ 1 & 1 & 1 & 1 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 1 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 1 & 1 & 1 & 1 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 1\\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 1 & 1 & 1 & 1\\ 3 & 2 & 1 & 0 & 0 & 0 & -1 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 3 & 2 & 1 & 0 & 0 & 0 & -1 & 0\\ 3 & 1 & 0 & 0 & 0 & -1 & 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 3 & 1 & 0 & 0 & 0 & -1 & 0 & 0\\ 0 & 1 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 3 & 1 & 0 & 0\\ \end{pmatrix}\cdot\begin{pmatrix} \alpha_0\\ \beta_0\\ \gamma_0\\ \delta_0\\ \alpha_1\\ \beta_1\\ \gamma_1\\ \delta_1\\ \alpha_2\\ \beta_2\\ \gamma_2\\ \delta_2\\ \end{pmatrix}= \begin{pmatrix} Q_0\\ Q_1\\ Q_1\\ Q_2\\ Q_2\\ Q_3\\ 0\\ 0\\ 0\\ 0\\ 0\\ 0\\ \end{pmatrix}$$Rovnice + vykreslení (Maple)

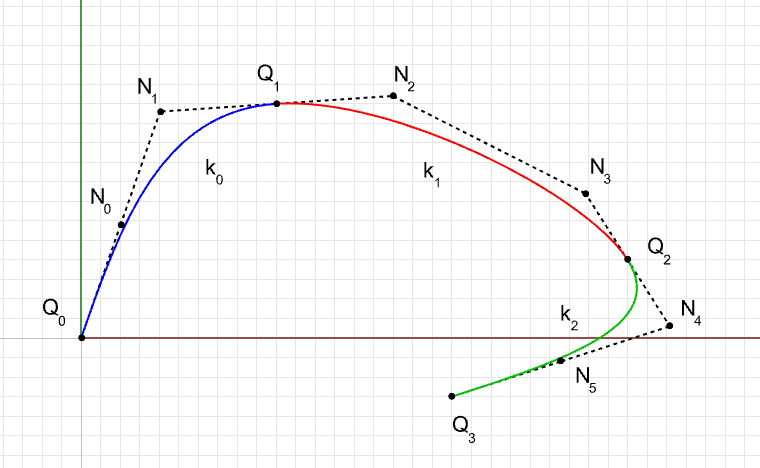
Využití $C^2$ napojení Bézierových kubik
soustava rovnic pro určení dvou vnitřních řídicích bodů každého segmentu
$$\Downarrow$$
$3$ Bézierovy kubiky $\rightarrow$ $6$ neznámých bodů $N_i$, $i=0,\dots,5$
$$\Downarrow$$
$C^1$ napojení Bézierových kubik ve vnitřních definičních bodech $Q_1$ a $Q_2$ $\rightarrow$ $N_1+N_2=2Q_1, N_3+N_4=2Q_2$
$C^2$ napojení Bézierových kubik ve vnitřních definičních bodech $Q_1$ a $Q_2$ $\rightarrow$ $-N_0+4N_1+N_3=4Q_1, -N_2+4N_3+N_5=4Q_2$
$$\Downarrow$$
$4$ rovnice pro $6$ neznámých
$$\Downarrow$$
dodat $2$ okrajové podmínky (např. nulový vektor druhé derivace v bodech $Q_0$ a $Q_3$)
Soustava rovnic pro určení bodů $N_i$
$$\begin{pmatrix} 0 & 1 & 1 & 0 & 0 & 0\\ 0 & 0 & 0 & 1 & 1 & 0\\ -1 & 4 & 0 & 1 & 0 & 0\\ 0 & 0 & -1 & 4 & 0 & 1\\ 2 & -1 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & -1 & 2\\ \end{pmatrix}\cdot\begin{pmatrix} N_0\\ N_1\\ N_2\\ N_3\\ N_4\\ N_5\\ \end{pmatrix}=\begin{pmatrix} 2Q_1\\ 2Q_2\\ 4Q_1\\ 4Q_2\\ Q_0\\ Q_3\\ \end{pmatrix}$$segmenty jako Bézierovy kubiky
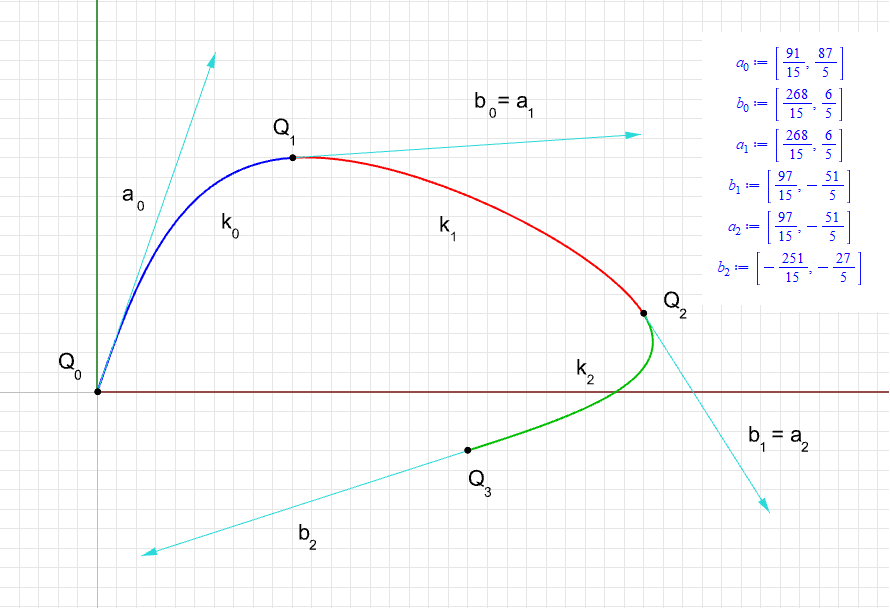
Využití $C^2$ napojení Fergusonových kubik
soustava rovnic pro určení vnitřních tečných vektorů
$$\Downarrow$$
$3$ Fergusonovy kubiky $\rightarrow$ $6$ neznámých vektorů $\vec{a}_i$, $\vec{b}_i$, $i=0,\dots,2$
$$\Downarrow$$
$C^1$ napojení Fergusonových kubik ve vnitřních definičních bodech $Q_1$ a $Q_2$ $\rightarrow$ $\vec{b}_0=\vec{a}_1, \vec{b}_1=\vec{a}_2$
$C^2$ napojení Fergusonových kubik ve vnitřních definičních bodech $Q_1$ a $Q_2$ $\rightarrow$ $\vec{a}_0+2\vec{b}_0+2\vec{a}_1+\vec{b}_1=3Q_2-3Q_0, \vec{a}_1+2\vec{b}_1+2\vec{a}_2+\vec{b}_2=3Q_3-3Q_1$
$$\Downarrow$$
$4$ rovnice pro $6$ neznámých
$$\Downarrow$$
dodat $2$ okrajové podmínky (např. nulový vektor druhé derivace v bodech $Q_0$ a $Q_3$)
Soustava rovnic pro určení vektorů $\vec{a}_i, \vec{b}_i$
$$\begin{pmatrix} 0 & 1 & -1 & 0 & 0 & 0\\ 0 & 0 & 0 & 1 & -1 & 0\\ 1 & 2 & 2 & 1 & 0 & 0\\ 0 & 0 & 1 & 2 & 2 & 1\\ 2 & 1 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 1 & 2\\ \end{pmatrix}\cdot\begin{pmatrix} \vec{a}_0\\ \vec{b}_0\\ \vec{a}_1\\ \vec{b}_1\\ \vec{a}_2\\ \vec{b}_2\\ \end{pmatrix}=\begin{pmatrix} 0\\ 0\\ 3Q_2-3Q_0\\ 3Q_3-3Q_1\\ -3Q_0+3Q_1\\ -3Q_2+3Q_3\\ \end{pmatrix}$$Segmenty jako Fergusonovy kubiky
Interpolační kubika - Rhino