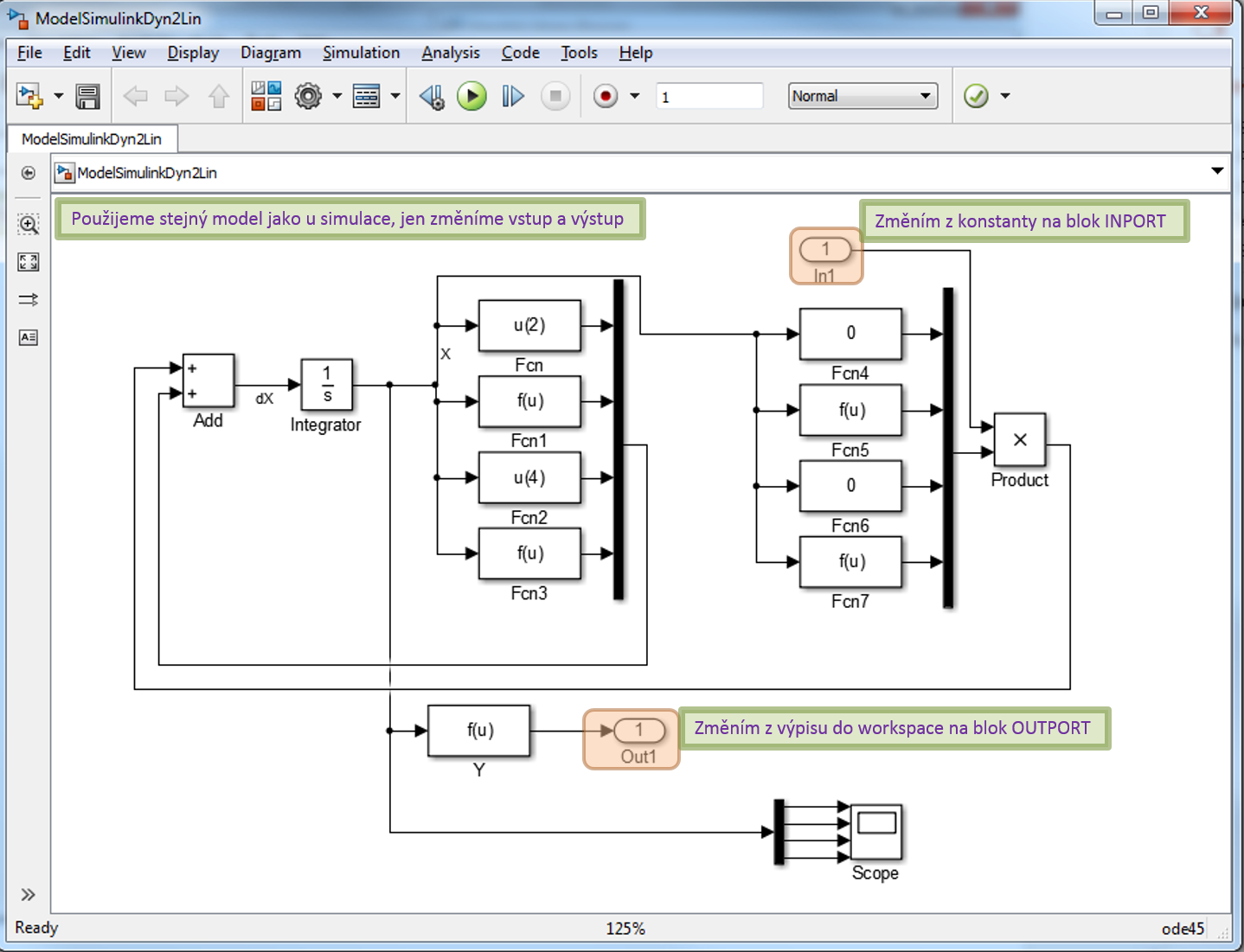
Samotnou linearizaci provedeme funkcí linmod v matlabu pomocí kódu:
% rovnovážný bod:[ˇstavyˇ],[ˇvstupˇ]
[A,B,C,D]=linmod('ModelSimulinkDyn2Lin',[0;0;0;0],0);
Takto získám matice A,B,C,D linearizovaného popisu soustavy kolem daného bodu, zde rovnovážného.