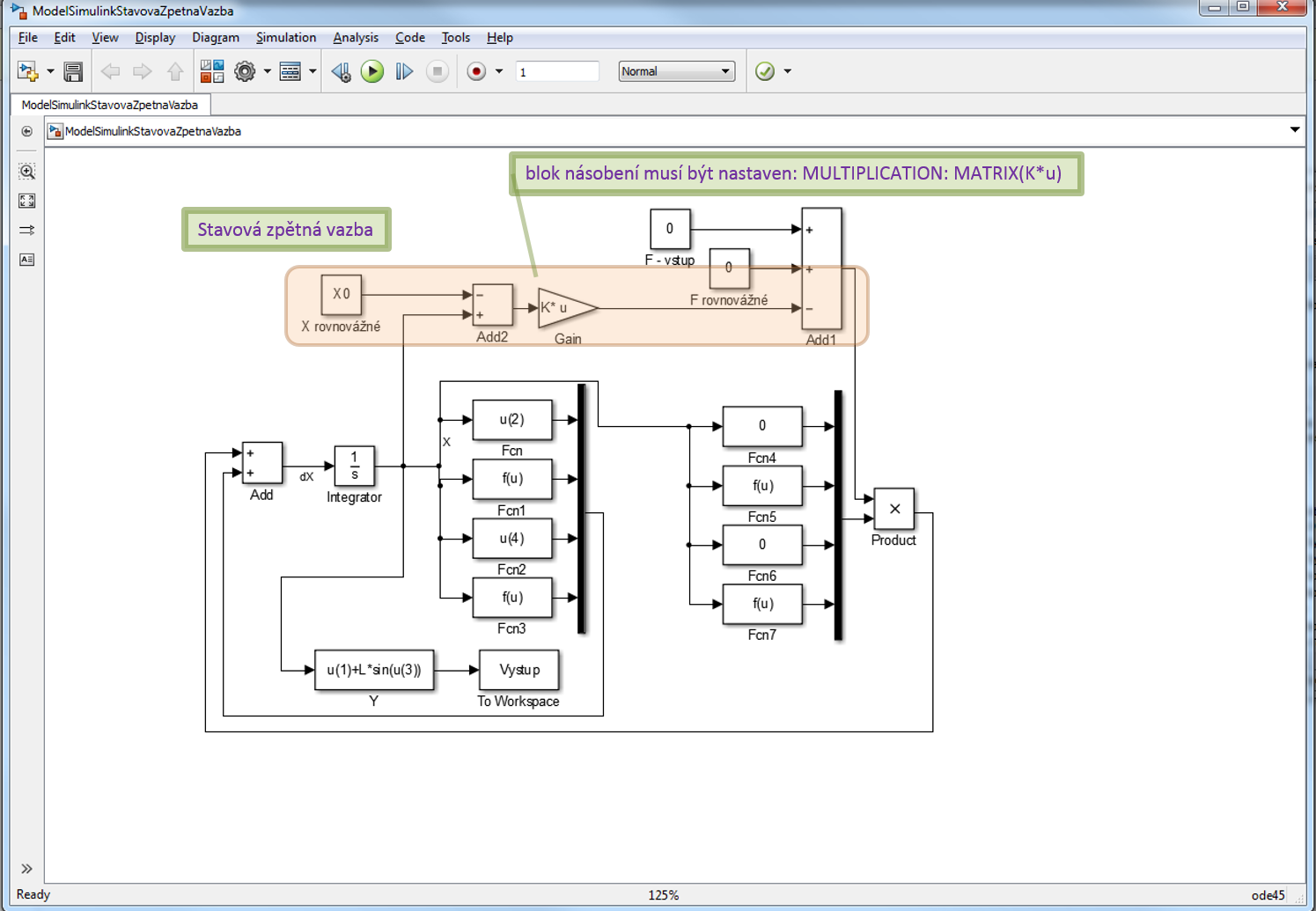
Pro zavedení stavové zpìtné vazby do našeho pùvodního nelineárního modelu tento model upravíme podle následujícího obrázku:
Je potøeba dát pozor na blok GAIN, který obsahuje zesílení stavové zpìtné vazby, abychom jej nastavili na maticové násobení. S takto upraveným modelem mùžeme provést èasové simulace se zesílením K stavové zpìtné vazby získaným Ackermanovou metodou nebo pomocí optimálního øízení LQR.
Pokud budeme potøebovat stavovou zpìtnou vazbu, ale nebudeme mít k dispozici všechny stavy, vytvoøíme stavového pozorovatele:
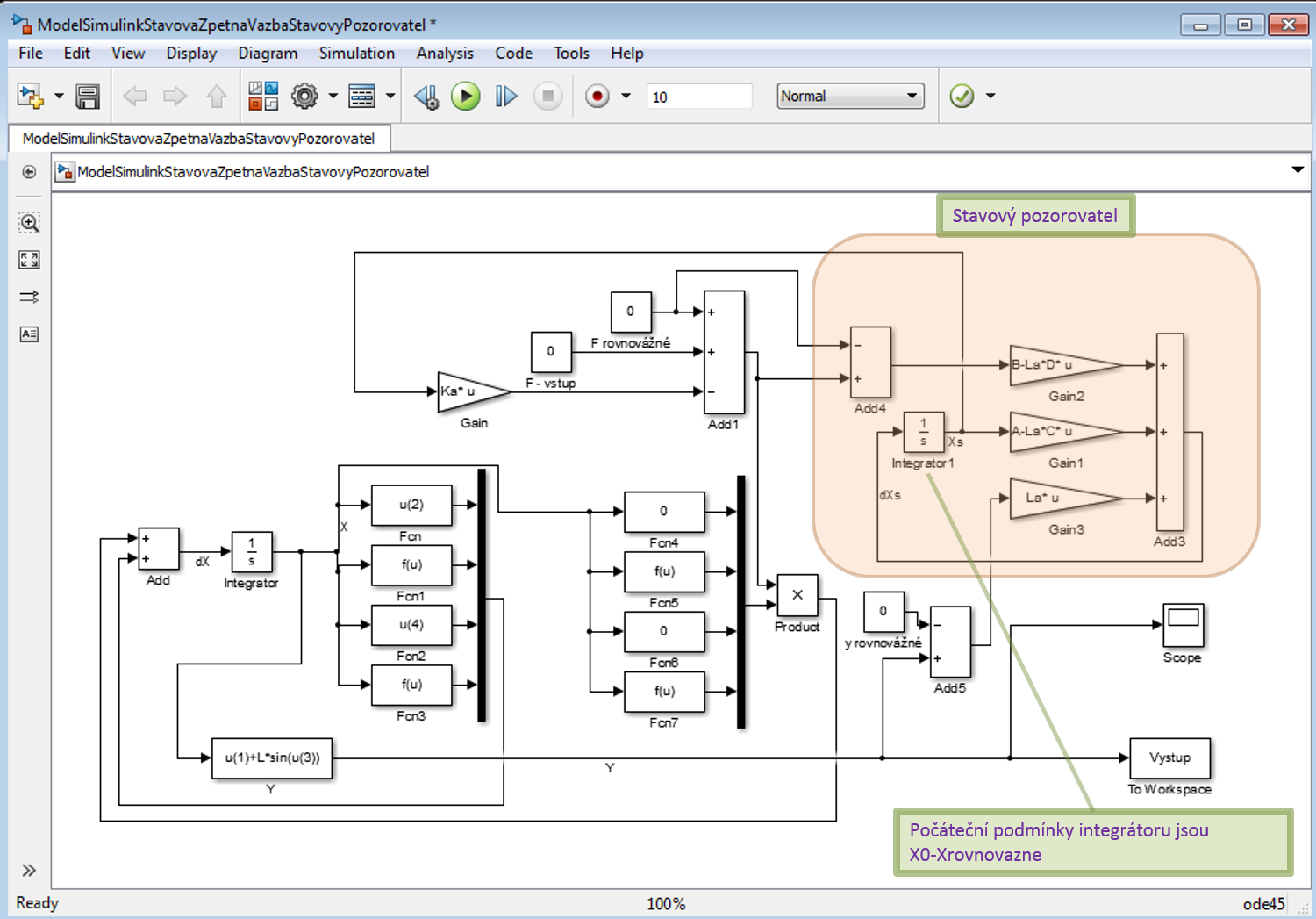
Kde zesílení stavové zpìtné vazby Ka je vzato z Ackermanovy formule a zesílení stavového pozorovatele La je také vypoèteno pomocí Ackermanovy formule a jeho nejpomalejší pól je 10x rychlejší než nejrychlejší pól pùvodního systému se zpìtnou vazbou.