→Model v Simulinku
Model v Simulinku
Máme matematický model naší soustavy, odvozený například metodou Lagrangeových rovnic II. druhu, metodou uvolňování, nebo jinak získaný. Nelineární soustavu
namodelujeme v prostředlí MATLAB-Simulink. Pokud zatím nemáte stavový popis kvůli složitosti systému, naleznete u tvorby modelu alternativní postup.
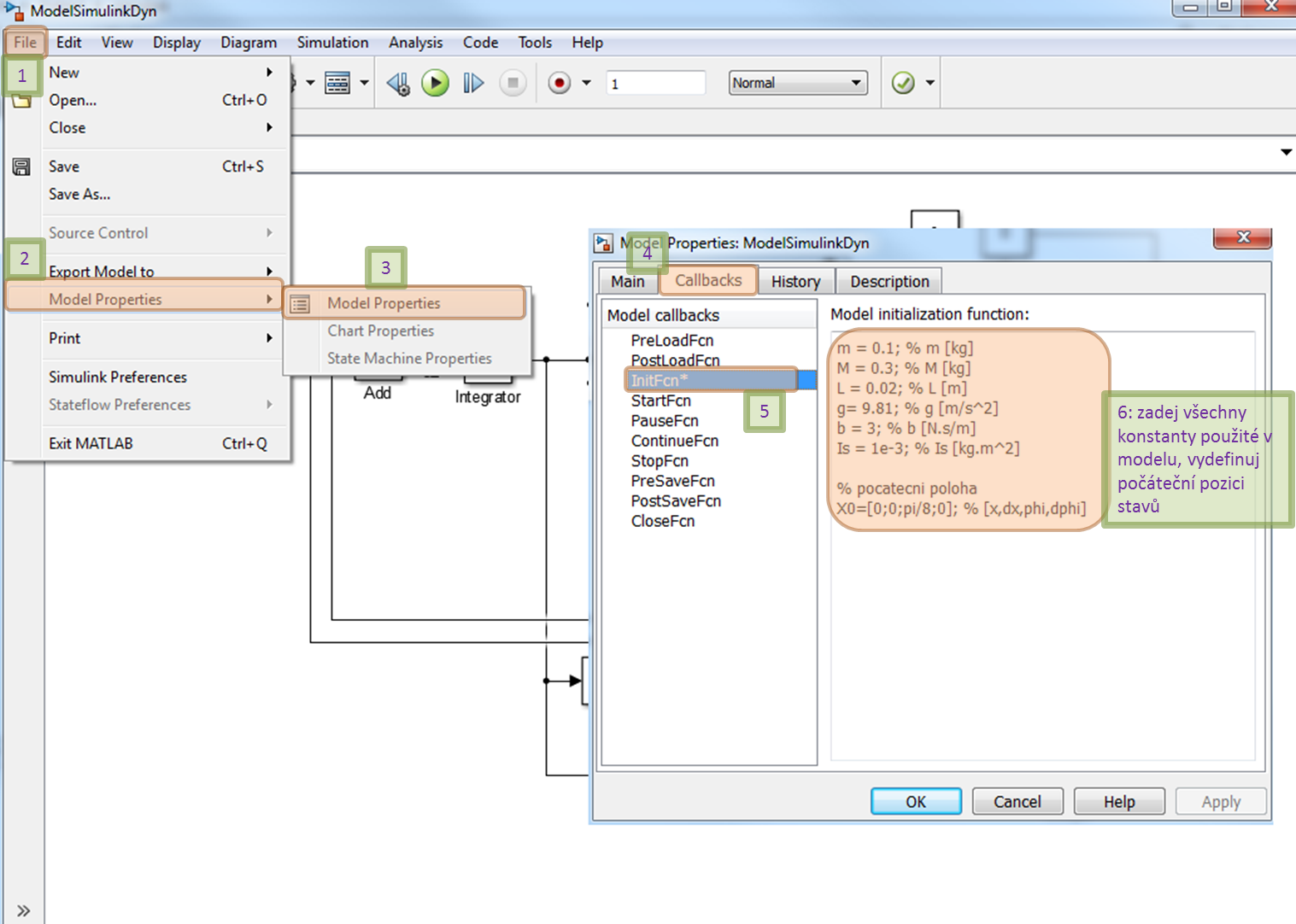
V Matlabu nejprve vytvoříme nový Simulink Model. Začneme jeho úpravou, jako první věc si nadefinujeme potřebné konstanty a vektor počáteční polohy X0.
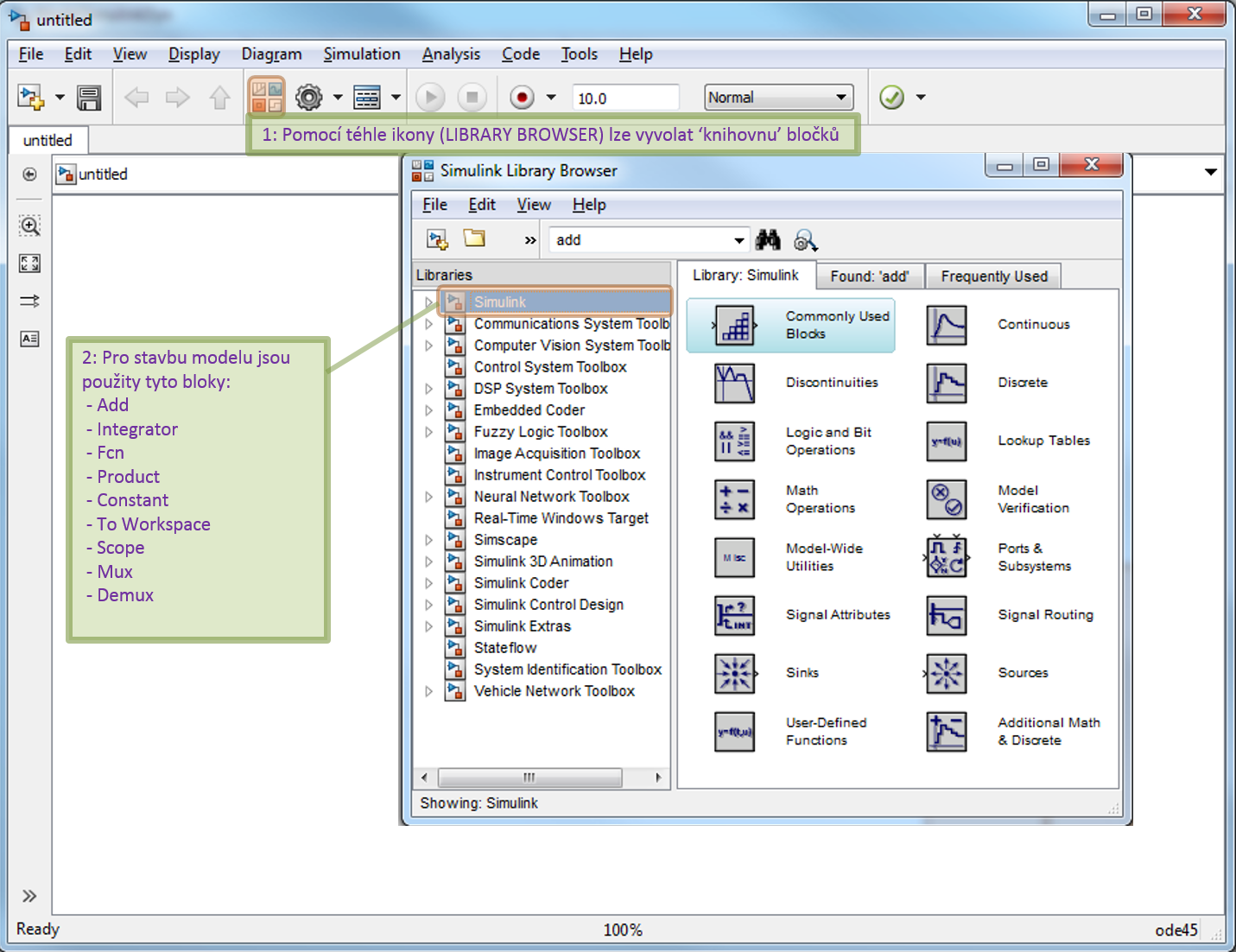
Pro stavbu modelu použiji tyto bloky:
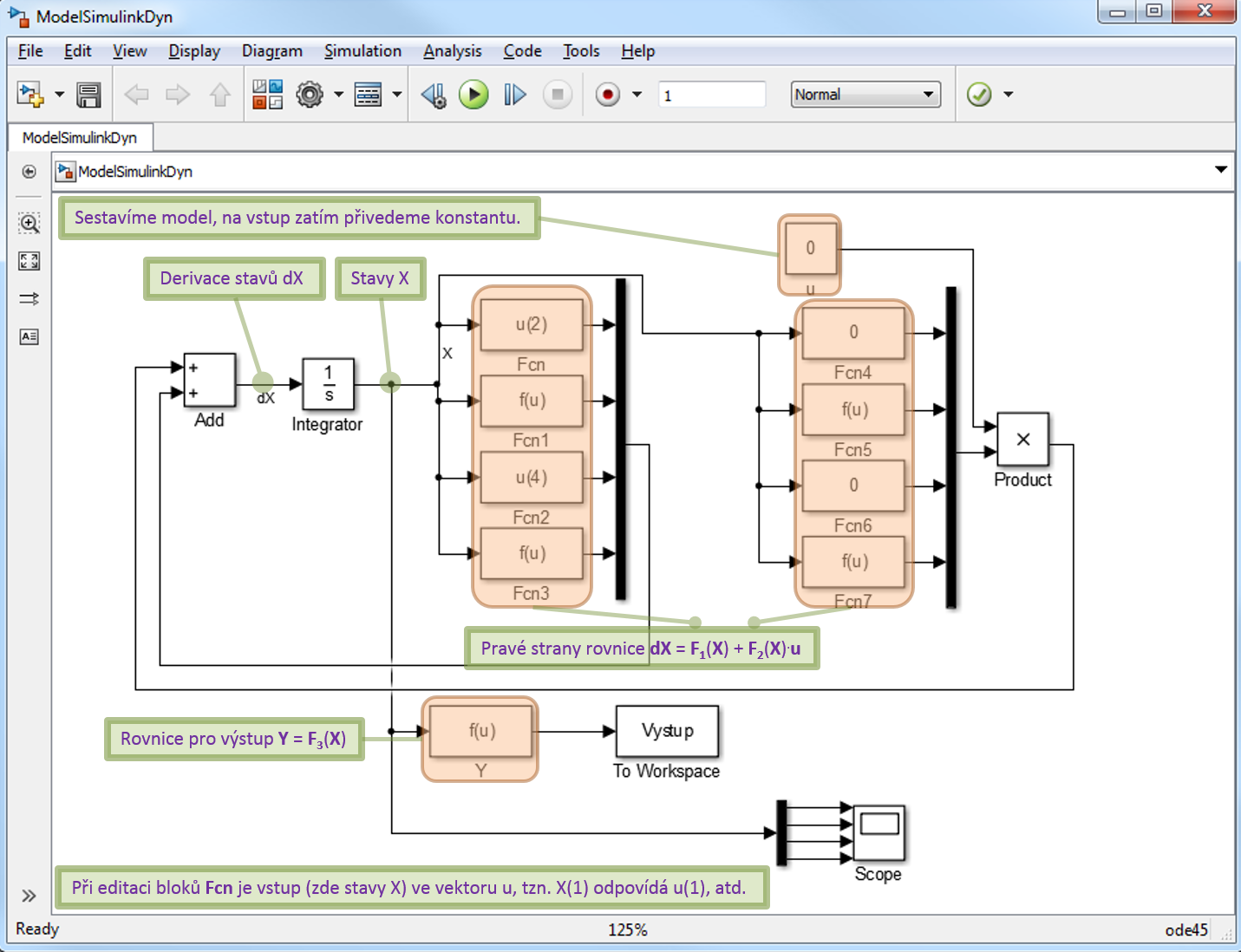
Model sestavíme podle následující ukázky, pokud je ale náš model příliš složitý a máme diferenciální rovnice druhého řádu, lze postupovat také alternativním postupem.
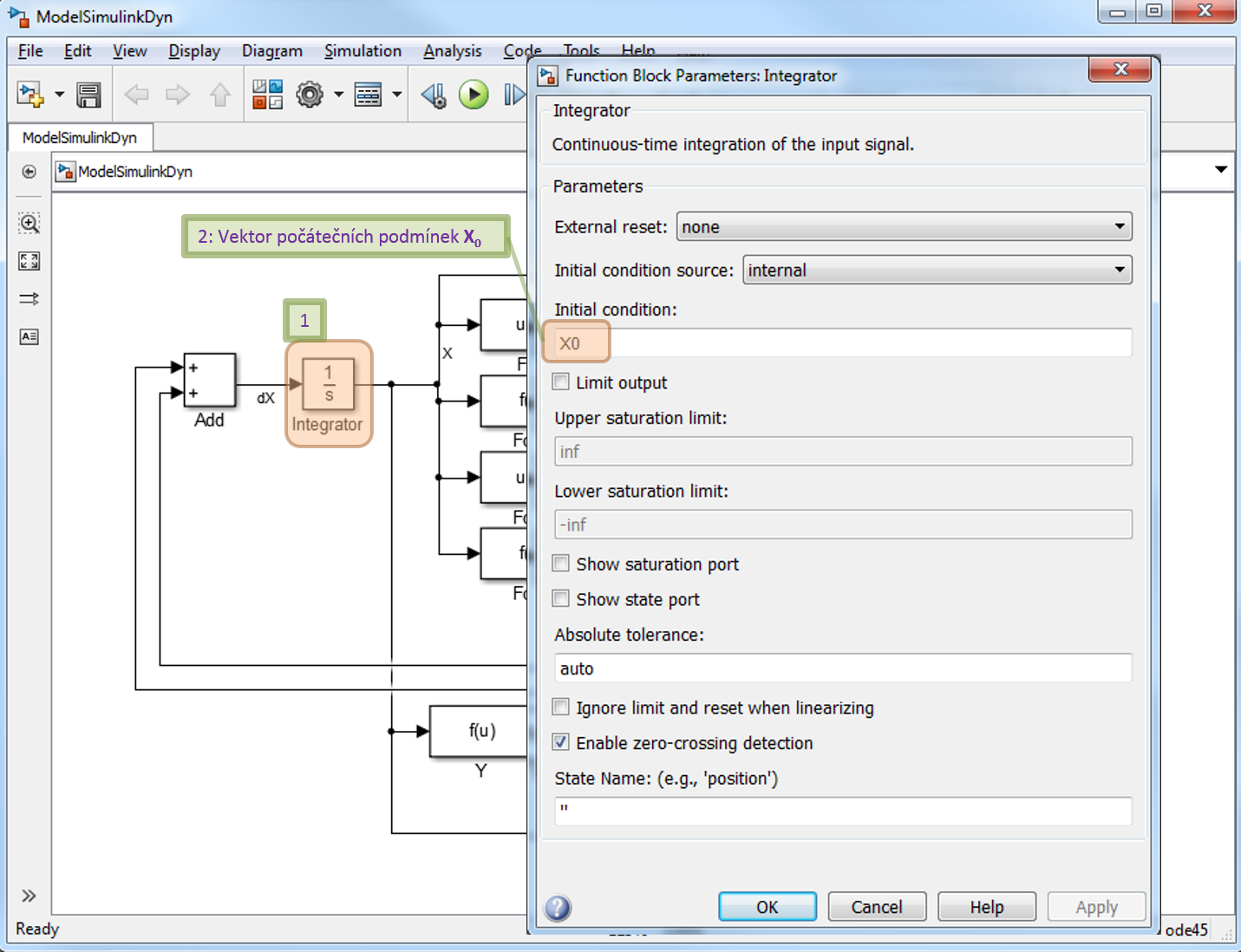
Nastavíme počáteční podmínky integrace:
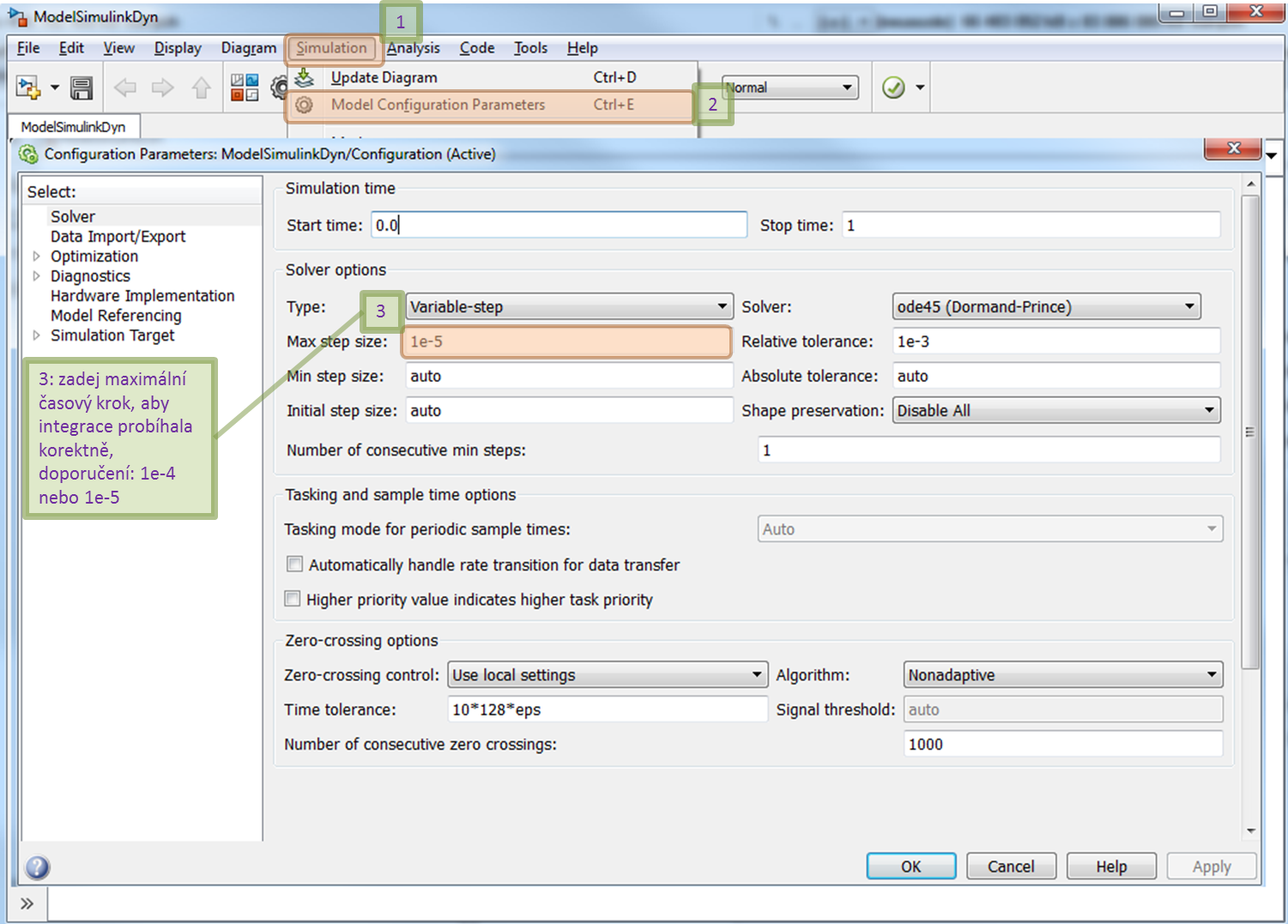
Nastavíme parametry simulace a můžeme začít simulovat:
Již můžeme simulovat (Simulation-Run). V bloku Scope lze sledovat průběhy stavů.