→Příprava řízení v Matlabu
Příprava řízení v Matlabu
Nejprve zjistíme, jestli je náš systém stabilní, řiditelný, pozorovatelný a případné tlumení systému. V matlabu provedeme výpočet vlastních čísel a zjistíme hodnost matice řiditelnosti a pozorovatelnosti:
Lambda = eig(A);
nR = rank(ctrb(A,B));
nC = rank(obsv(A,C));
Tlumení lze získat v matlabu příkazem:
damp(A)
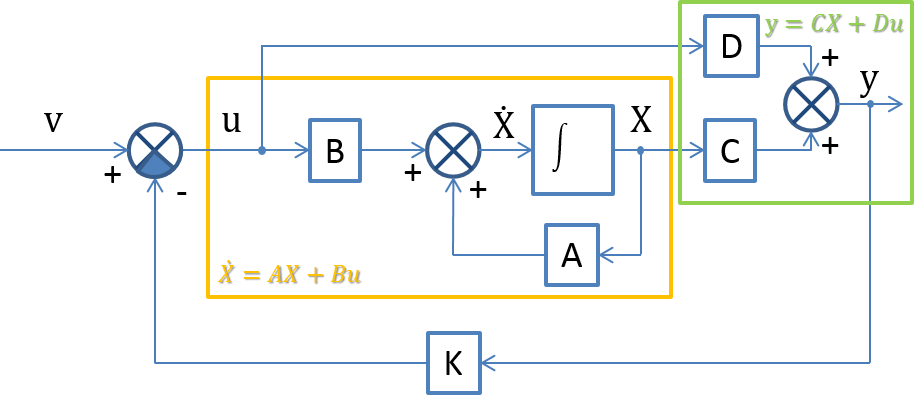
Je-li náš systém nestabilní ale řiditelný, pokusíme se najít výstupní zpětnou vazbu metodou umísťováním pólů tak, že měníme zesílení zpětné vazby K od nuly do nekonečna. Schéma výstupní zpětné vazby aplikované na linearizovaném systému:
V matlabu se vykreslí poloha pólů v komplexní rovině příkazem:
rlocus(A,B,C,D);
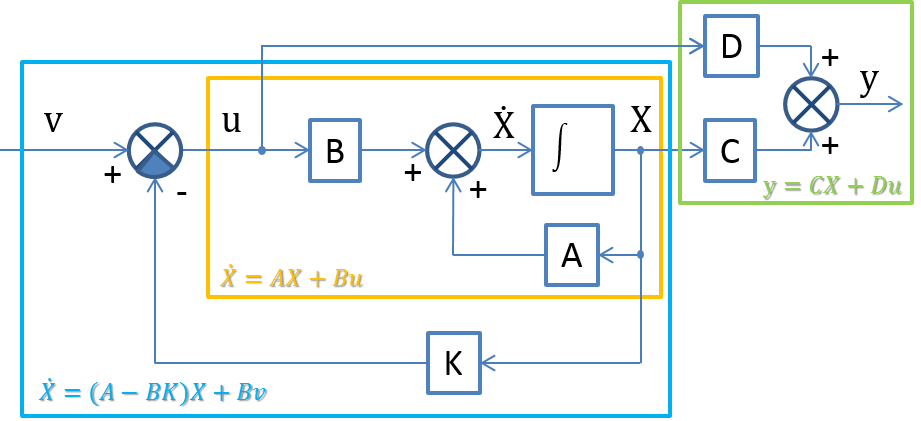
Pokud nenalezneme takové zesílení K, pro které by byl systém stabilní, použijeme stavovou zpětnou vazbu, systém pořád musí být řiditelný. Schéma stavové zpětné vazby je na následujícím obrázku:
Pro SISO systémy lze použít Ackermanovu formuli pro výpočet stavové zpětné vazby s tím, že jsme schopni předepsat, kde budou póly výsledného systému P=[p1,...,pn]. V matlabu existuje příkaz:
K = acker(A,B,P);
Pro obecné systémy můžeme zesílení zpětné vazby K získat lineárním optimálním řízením, tzv. LQR. To pracuje s kriteriální funkcí
| | J=0.5 | ⌠
⌡
|
∞
0
|
(xTQx+uTRu+2xTNu)dt |
| |
|
kde matice váhových koeficientů Q a R volíme diagonální, matice N se zpravidla nevyskytuje:
| | Q = | ⎡
⎢
⎢
⎢
⎣
|
| ⎤
⎥
⎥
⎥
⎦
|
, R = | ⎡
⎢
⎢
⎢
⎣
|
| ⎤
⎥
⎥
⎥
⎦
|
|
| |
|
Pak lze najít zesílení stavové zpětné vazby funkcí v matlabu:
K = lqr(A,B,Q,R);
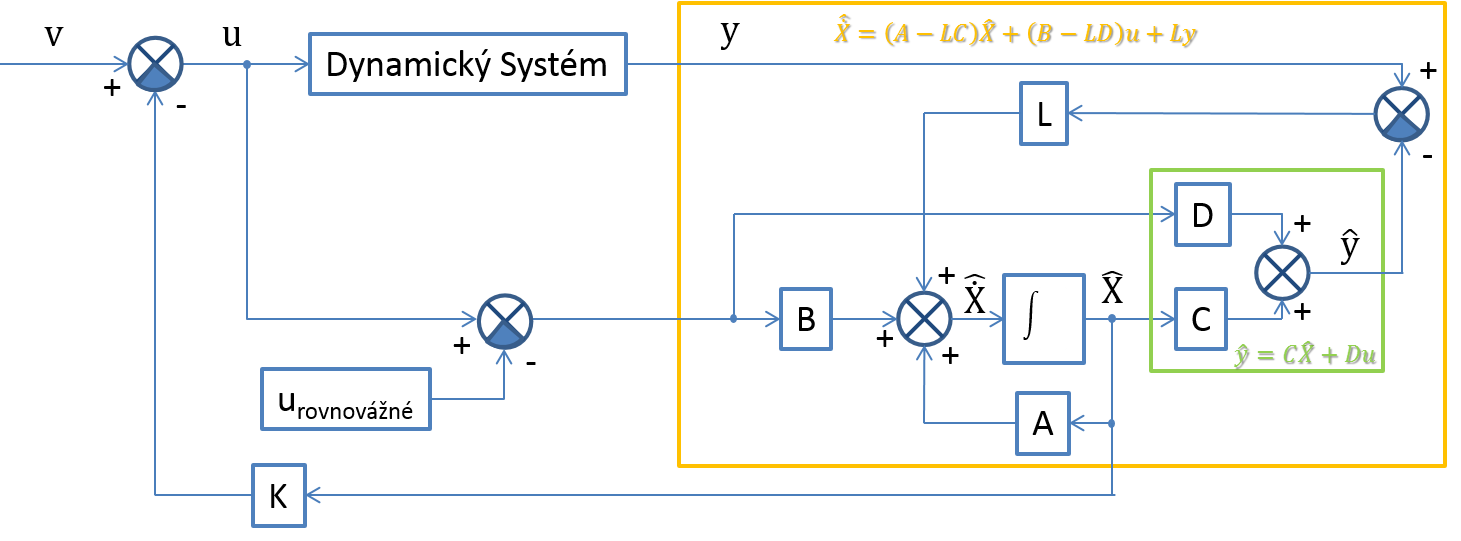
Nemáme-li možnost odměřit stavy pro získání stavové zpětné vazby, můžeme použít stavového pozorovatele pro simulační rekonstrukci stavů. Schéma stavového pozorovatele (ve žlutém rámečku) je na obrázku:
Systém musí být pozorovatelný a musíme znát jeho model. Pak lze pomocí matlabu najít zesílení L užitím ackermanovy formule (má-li systém jeden výstup):
kde póly P musí být aspoň 10x větší než největší pól systému stavovou zpětnou vazbou stabilizovaného.
Pro vyhodnocení linearizovaného modelu lze použít následující funkce jednotkového skoku, skokové změny a nyquistova diagramu:
impulse,step,nyquist