Vezmeme soustavu rovnic druhého řádu popisujících naši soustavu:
|
abychom mohli vytvořit stavový popis, potřebujeme získat druhé derivace stavů x a φ. Toto lze udělat vynásobením zleva maticí inverzní k M:
|
což může vést na nepříjemné výrazy, proto postup v modelování v Matlab-Simulink mírně upravíme. Problematická část je inverze matice M, tu ale můžeme zapsat jako:
|
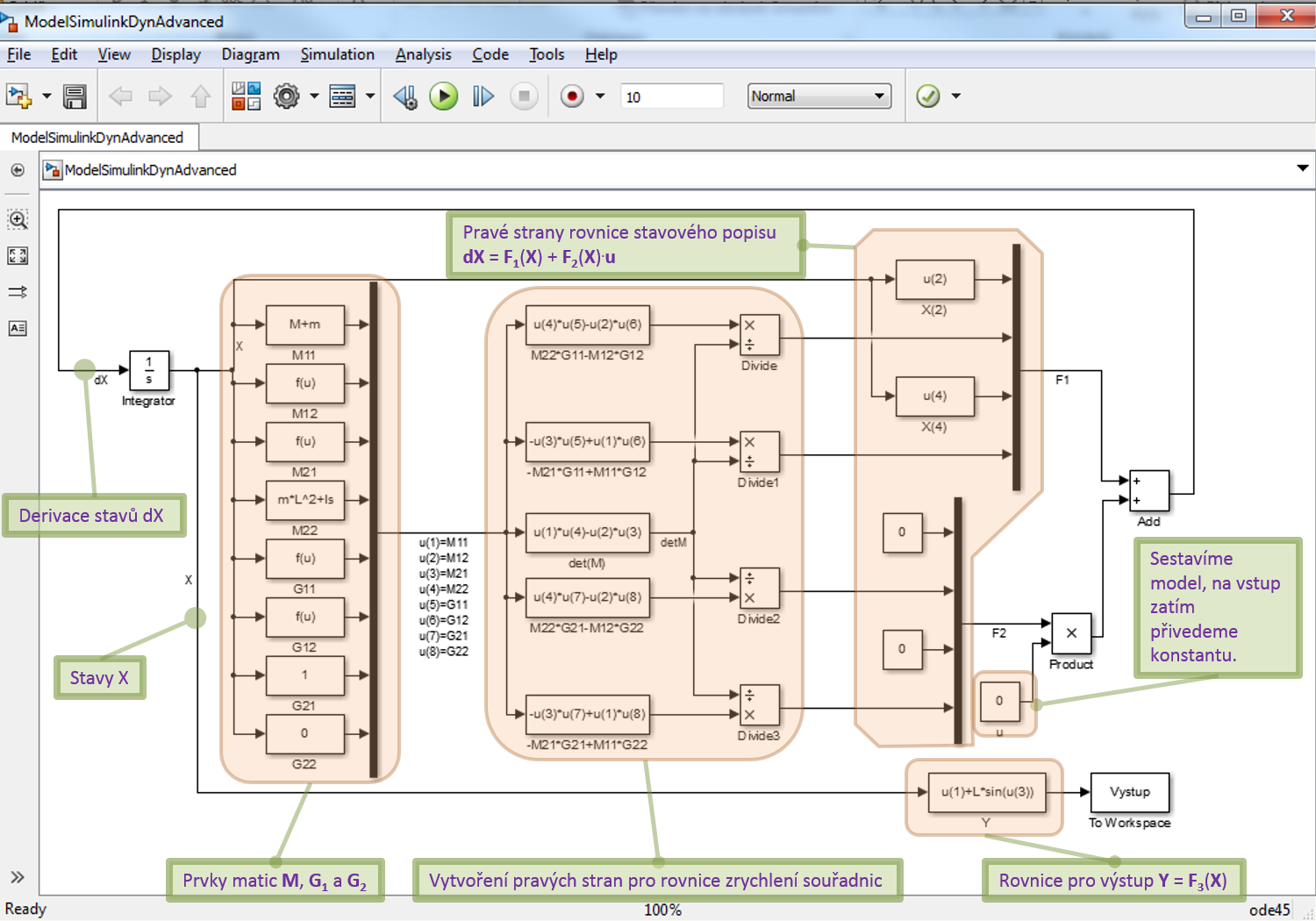
přičemž prvky adjungované matice jsou lineární kombinací prvků matice M. Adjungovanou maticí pak můžeme násobit vektory na pravé straně, čímž dojde ke zkrácení příliš dlouhých výrazů. V Simulinku postupujeme následovně: Nejprve si vyjádříme prvky matic M, G1 a G2. Z nich pak určíme determinant matice M a součiny adjungované matice M a vektorů G1 a G2. Prostým podělením součinů determinantem získáme potřebnou pravou stranu druhých derivací stavů. Na následujícím schématu je ukázán postup pro dva stupně volnosti:
Pak už jednoduše vytvoříme stavový popis jak jsme zvyklí a použijeme funkci pro výstupní veličinu y.
|
A pokračujeme dále podle původního schématu.